اثر جوشکاری رباتها تحت تأثیر جنبههای زیادی قرار دارد. بسیاری از مشتریان قبل از اینکه در استفاده از رباتهای جوشکاری مهارت پیدا کنند، کم و بیش با مشکلاتی روبرو میشوند. اساساً، این مشکلات ناشی از عملکرد نادرست یا تنظیمات نامناسب ربات هستند و میتوان آنها را با تنظیمات مناسب حل کرد. در ادامه، ویرایشگر شما را به بررسی برخی از مشکلاتی که اغلب در استفاده از رباتهای جوشکاری یونهوا رخ میدهد و راهحلهای مرتبط با آن میبرد.
۱. شروع ناموفق قوس در حین جوشکاری
۱. قوس هنوز شروع نشده است
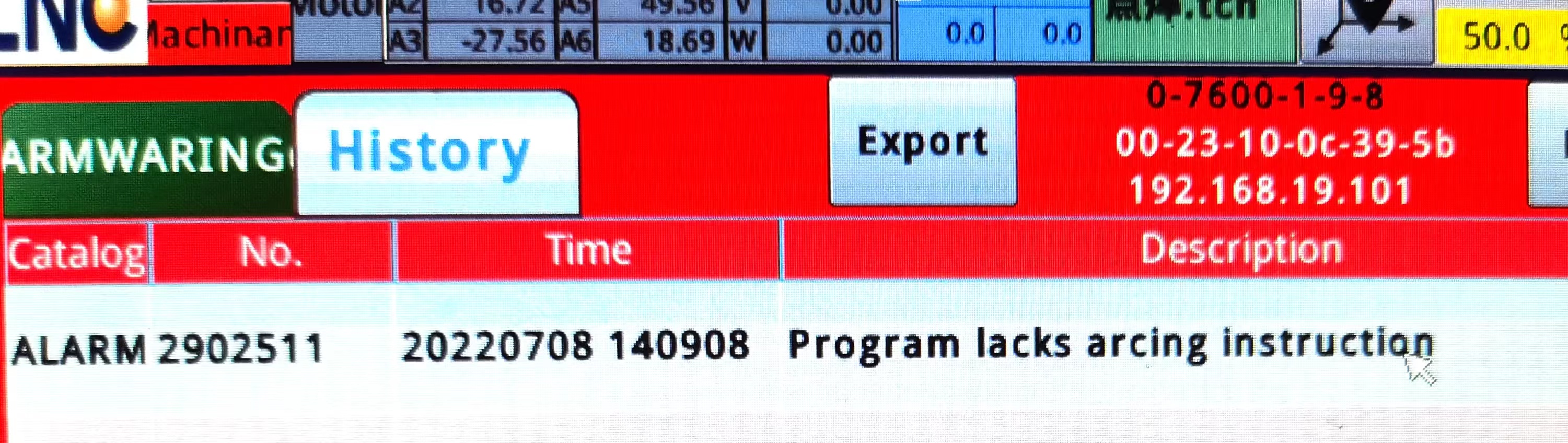
دلیل: قبل از اجرای دستور پایان قوس در برنامه ویرایش شده، دستور شروع قوس مربوطه وجود ندارد.
روش پردازش: بررسی کنید که آیا یک دستور پایان قوس دیگر اضافه کنید یا یک دستور شروع قوس کمتر.
۲. قوس الکتریکی شروع نشد، تشخیص سیگنال اشتباه است.
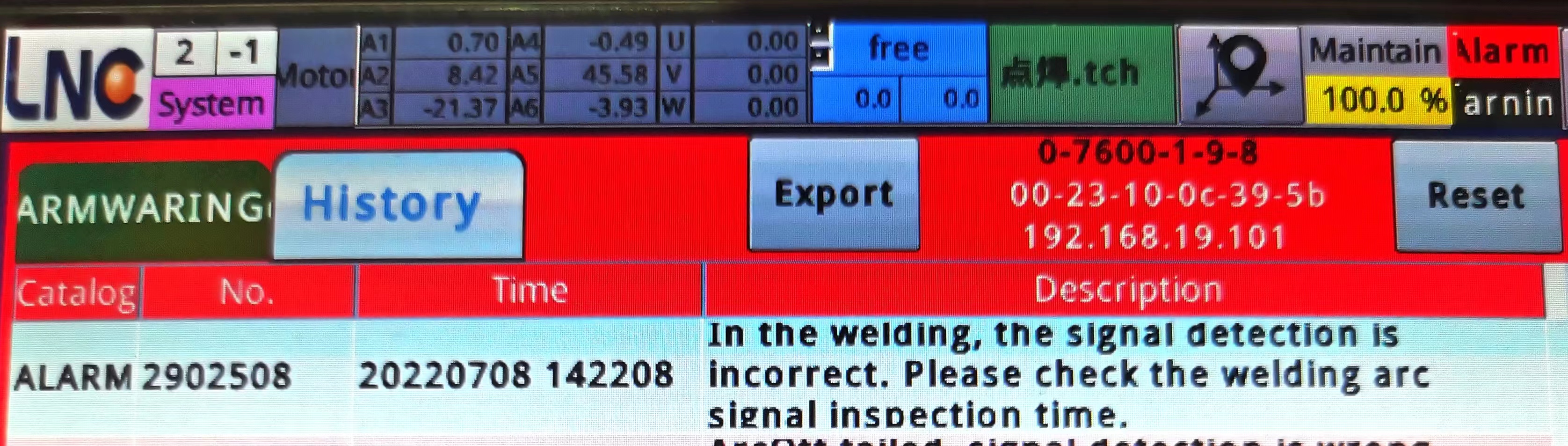
رویکرد:
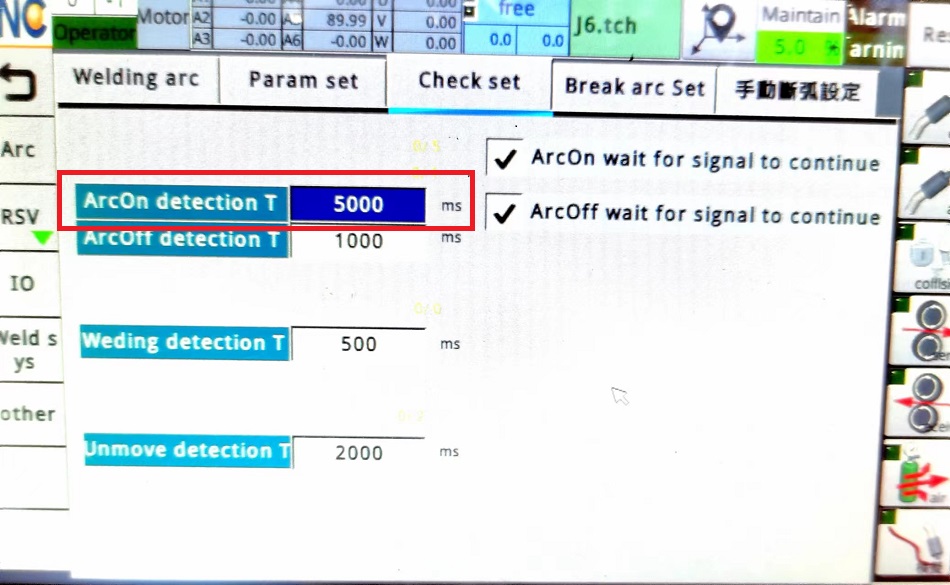
۱) تنظیم زمان وقفه جوشکاری را در صفحه پارامترها بررسی کنید. به طور کلی، تنظیم زمان روی ۵۰۰۰ میلیثانیه مناسب است.
۲) بررسی کنید که آیا سیگنال دستگاه جوشکاری با موفقیت به سیستم منتقل میشود یا خیر
۳) بررسی کنید که آیا قطعه کار به زمین متصل است یا خیر
۳. سیم قوسی سرخشده
دلیل:
۱) عدم تطابق جریان و ولتاژ
روش پردازش: ما باید جریان و ولتاژ مناسب را با توجه به ضخامت واقعی قطعه کار و دستگاه جوش تنظیم کنیم.
۲) طول سیم جوش خیلی زیاد است
روش درمان: به طور کلی طول سیم جوش 10 تا 15 برابر قطر سیم جوش است و طول مناسب سیم جوش با توجه به قطر سیم جوش انتخاب می شود.

جریان خیلی کم منجر به جوش ناهموار میشود

جریان و ولتاژ عادی، جوش زیبا و محکم

انتهای مشعل جوشکاری، سیم را به صورت گلوله در میآورد.

سیم انتهایی مشعل جوشکاری پس از جوشکاری معمولی در وضعیت خوبی قرار دارد.
۴. پدیده خاموش شدن خودکار قوس پس از قوس زدن رخ میدهد.
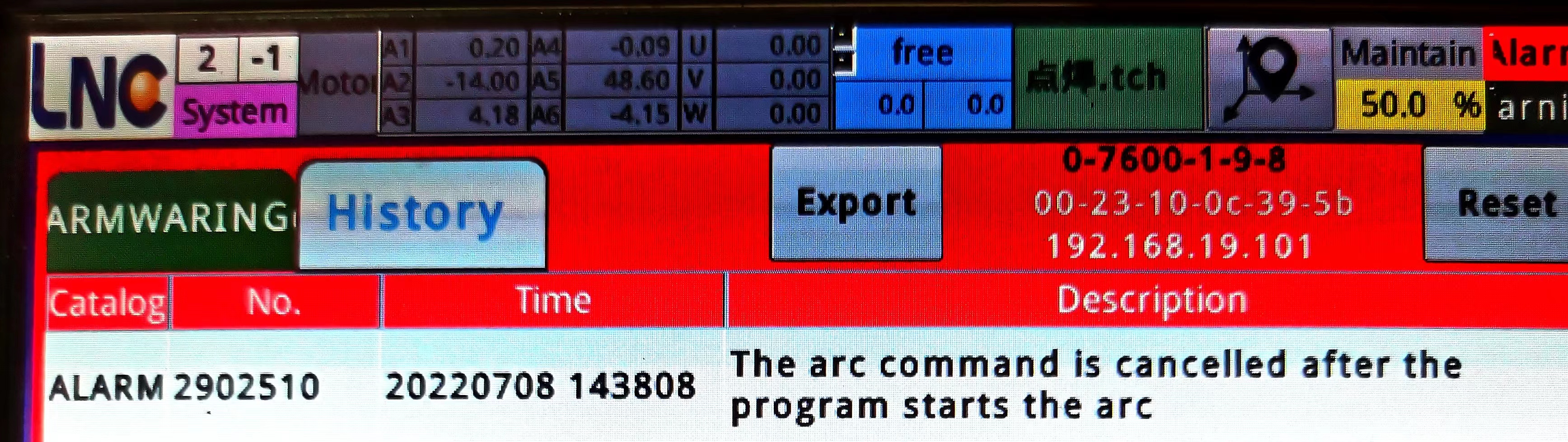
راه حل: بررسی کنید که آیا مشکلی در تنظیم زمان پارامتر وجود دارد که جابجا نشده است و بررسی کنید که آیا مشعل جوشکاری جابجا شده است یا خیر.
۲. شکست قوس در حین جوشکاری رخ میدهد
دلیل:
۱. اگر سیم جوش به قطعه کار برخورد نکند، زنگ هشدار قطع قوس الکتریکی به صدا در میآید.
روش درمان: موقعیت سیم جوش و قطعه کار را دوباره تنظیم کنید، به طوری که سیم جوش در طول فرآیند جوشکاری کاملاً با قطعه کار تماس داشته باشد. (اما نباید خیلی به قطعه کار نزدیک باشد، ممکن است منجر به جوشکاری از طریق قطعه کار شود)
2. مسیر جوشکاری غیرمنطقی باعث میشود که سر تفنگ به دلیل برخورد به طور خودکار بالا برود
راه حل: مسیر جوشکاری را مجدداً تنظیم کنید
۳. سیمهای مثبت و منفی دستگاه جوش در تماس ضعیفی هستند.
روش درمان: وضعیت سیمکشی سیمهای مثبت و منفی را بررسی کنید.
۳. دلایل خرابی قوس پس از جوشکاری
۱. خطای قوس، خطای تشخیص سیگنال
دلیل: دستگاه جوش سیگنال را از ربات دریافت نکرد، که باعث شد ربات نتواند قوس را ببندد.
رویکرد:
(1) بررسی کنید که آیا پارامترهای تنظیم معقول هستند یا خیر
(2) سیگنال IO را بررسی کنید و بررسی کنید که آیا سیگنال نقطه پایان I غیر طبیعی است یا خیر. اگر سیگنال نقطه I همچنان روشن باشد.
(3) بررسی کنید که آیا اتصال کوتاه در خط وجود دارد یا خیر و آیا سیم زمین به طور غیرطبیعی وصل شده است یا خیر
۲. پس از ایجاد قوس، هیچ دستور توقف قوس تنظیم نمیشود.

دلیل: وقتی این هشدار روی آویز آموزشی رخ میدهد، بررسی کنید که آیا فراموش کردهاید دستور پایان قوس را اضافه کنید یا خیر.
روش پردازش: اضافه کردن یک دستور پایان قوس بعد از دستور شروع قوس در برنامه
این مشکل عمدتاً مشکلات مربوط به شروع قوس، قطع قوس و پایان قوس ربات جوشکاری Yunhua را در طول فرآیند جوشکاری مطرح میکند. اگر کاربران در حین استفاده با چنین مشکلاتی مواجه شدند، میتوانند به راهحلها مراجعه کنند. اگر این مشکلات قابل حل نبودند، لطفاً به موقع از تکنسینهای Yunhua کمک بگیرید.
اگر میخواهید با مشکلات و راهحلهای رایج ربات یونهوا بیشتر آشنا شوید، لطفاً به حساب رسمی ربات یونهوا مراجعه کنید.
ربات جوشکاری یونهوا یک ربات اتوماتیک است که جوشکاری چند منظوره مانند جوشکاری با گاز محافظ، جوشکاری قوس آرگون، برش پلاسما و جوشکاری لیزر را ادغام میکند. این ربات دارای انعطافپذیری بالا، سازگاری قوی، راندمان جوشکاری کارآمد و کیفیت جوشکاری پایدار است و میتواند به طور گسترده در زمینههای مختلف مانند تولید ماشینآلات، خودروسازی، الکترونیک دقیق و معدن زغال سنگ و سایر زمینهها مورد استفاده قرار گیرد.
زمان ارسال: ۱۵ ژوئیه ۲۰۲۲



